Исследователи из Лаборатории робомеханики Университета Карнеги-Меллон в США разработали уникального четвероногого робота-скалолаза LORIS, который значительно отличается от существующих аналогов. Разработку назвали в честь семейства лориевых, приматов – лемуров, и аббревиатуры Lightweight Observation Robot for Irregular Slopes. Об этом сообщает издание New Atlas.
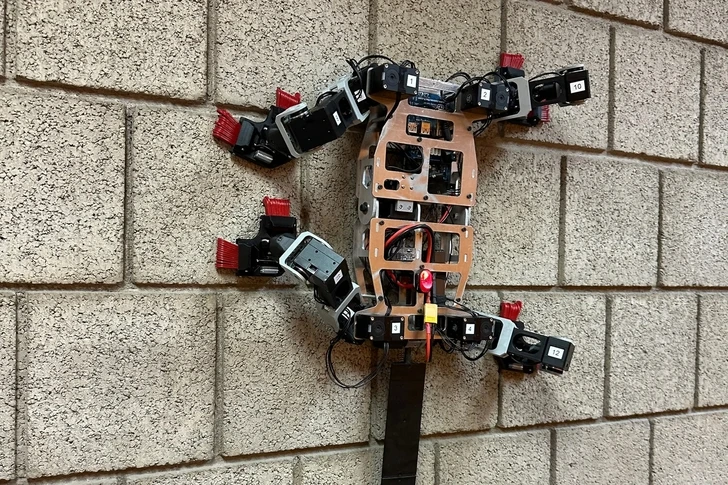
LORIS оснащен четырьмя ногами с микроспинными захватами, состоящими из множества мелких острых крючков, которые зацепляются за небольшие углубления на поверхности. Это позволяет ему преодолевать шероховатые поверхности, такие как кирпичные или каменные стены, в отличие от роботов, использующих системы захвата на основе всасывания, которые эффективны только на гладких поверхностях.
Однако, в отличие от других роботов с микроспинными захватами, использующих пассивный захват, полагающийся на вес робота, LORIS использует активный захват с электроприводами, целенаправленно погружающими кольца крючков в поверхность. Это обеспечивает моторизованный захват, работающий в любом направлении, и позволяет реализовать любой сценарий и стратегию подъема.
Каждая из четырех ног робота имеет разветвленный микроспинный захват, состоящий из двух групп шипов, расположенных под прямым углом друг к другу. Захват соединен с ногой пассивным лучезапястным суставом, что позволяет ему просто болтаться в воздухе и активно реагировать на движения ноги. Это также значительно снижает вес робота.
Таким образом, LORIS представляет собой революционное изобретение в области робототехники, которое может быть использовано для различных задач, включая мониторинг строительных работ, поисково-спасательные операции и исследования труднодоступных территорий.





